
 19
19
 行业资讯
行业资讯
吴滨 X 米兰设计周:纸随灵动,丈量
2024-04-22 10984 设计欣赏
设计欣赏
首届展览由设计
2024-04-12 2419 行业资讯
行业资讯
澳大利亚建筑师的作品--建筑设计
2024-04-09 2369 设计名家
设计名家
艺术家帕特里克·约瑟夫(Patrick Jos
2024-04-09 2142 设计欣赏
设计欣赏
泰勒·迪布设计--插图设计
2024-04-08 2129 设计欣赏
设计欣赏
游艇内的装修--设计
2024-04-09 2120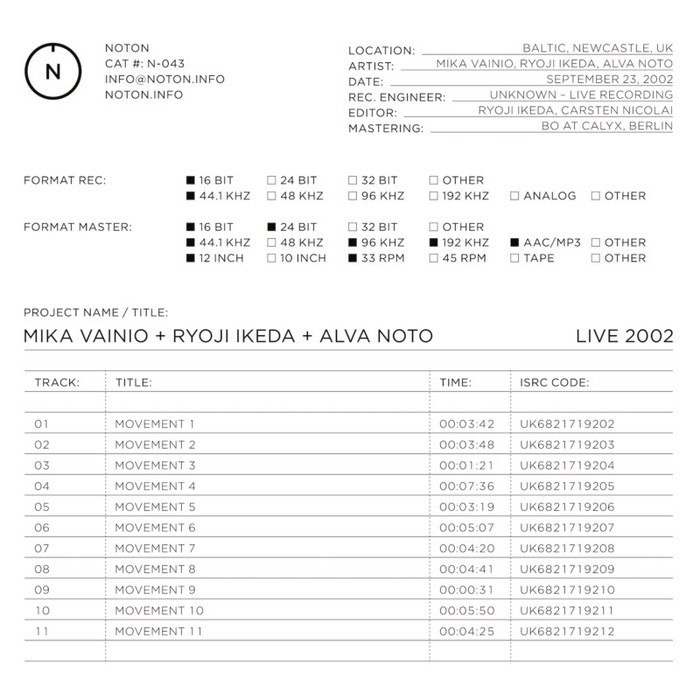 设计欣赏
设计欣赏
音响艺术家卡斯滕·尼科莱(Carsten N
2024-04-09 2093 行业资讯
行业资讯
创意拍摄小技巧
2024-04-17 1948